基于YOLO的無人機(jī)技術(shù) 研究綜述、應(yīng)用與工程試驗(yàn)發(fā)展
隨著計(jì)算機(jī)視覺與無人機(jī)技術(shù)的深度融合,基于YOLO(You Only Look Once)系列目標(biāo)檢測算法的無人機(jī)應(yīng)用研究已成為當(dāng)前工程與技術(shù)領(lǐng)域的熱點(diǎn)。YOLO算法以其卓越的實(shí)時(shí)性、高精度和輕量化特性,為無人機(jī)賦予了強(qiáng)大的環(huán)境感知與智能決策能力,極大地拓展了無人機(jī)的應(yīng)用邊界。
一、 基于YOLO的無人機(jī)技術(shù)研究綜述
YOLO算法自2015年問世以來,經(jīng)歷了從YOLOv1到Y(jié)OLOv5、YOLOv7乃至YOLOv8、YOLO-NAS等版本的快速迭代。其核心思想是將目標(biāo)檢測任務(wù)重構(gòu)為單一的回歸問題,直接在整幅圖像上預(yù)測邊界框和類別概率,實(shí)現(xiàn)了速度與精度的良好平衡。在無人機(jī)技術(shù)研究中,針對其應(yīng)用場景的特殊性,主要研究方向集中在:
- 算法輕量化與優(yōu)化:為適應(yīng)無人機(jī)機(jī)載計(jì)算平臺(如Jetson系列)有限的算力與功耗,研究通過模型剪枝、量化、知識蒸餾以及采用更高效的網(wǎng)絡(luò)架構(gòu)(如YOLO的Focus結(jié)構(gòu)、CSPNet)來壓縮和加速模型。
- 小目標(biāo)檢測增強(qiáng):無人機(jī)航拍圖像中目標(biāo)通常尺寸較小且密集。研究通過改進(jìn)特征金字塔網(wǎng)絡(luò)(如BiFPN、PANet)、引入注意力機(jī)制(如SE、CBAM)以及在更精細(xì)的特征圖上進(jìn)行檢測,以提升對小目標(biāo)的檢測性能。
- 復(fù)雜場景適應(yīng)性:針對光照變化、天氣干擾、目標(biāo)遮擋及復(fù)雜背景等挑戰(zhàn),研究通過數(shù)據(jù)增強(qiáng)(如 mosaic、mixup)、多尺度訓(xùn)練、以及在損失函數(shù)(如CIoU、Focal Loss)上進(jìn)行優(yōu)化,提升模型的魯棒性。
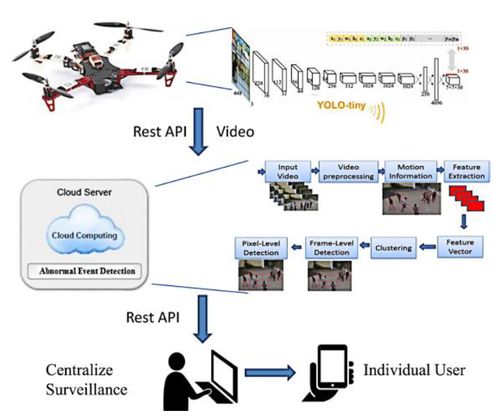
- 實(shí)時(shí)視頻流處理:研究如何在無人機(jī)實(shí)時(shí)傳輸?shù)囊曨l流中穩(wěn)定、連續(xù)地執(zhí)行YOLO檢測,涉及幀間信息關(guān)聯(lián)、跟蹤算法(如DeepSORT、ByteTrack)的集成,以形成完整的“檢測-跟蹤”流水線。
二、 典型應(yīng)用領(lǐng)域
基于YOLO的無人機(jī)技術(shù)已廣泛應(yīng)用于國民經(jīng)濟(jì)的多個關(guān)鍵領(lǐng)域:
- 精準(zhǔn)農(nóng)業(yè)與林業(yè)管理:用于作物長勢監(jiān)測、病蟲害識別、森林火災(zāi)預(yù)警、野生動物種群普查等。無人機(jī)搭載YOLO模型可快速掃描大面積區(qū)域,準(zhǔn)確定位并識別目標(biāo),實(shí)現(xiàn)高效、非接觸式的監(jiān)測與管理。
- 基礎(chǔ)設(shè)施巡檢:在電力線、光伏電站、風(fēng)力發(fā)電機(jī)、橋梁、管道等設(shè)施的巡檢中,無人機(jī)可自動檢測絕緣子破損、螺栓缺失、表面裂紋、植被入侵等缺陷與隱患,保障公共安全并降低人工巡檢成本與風(fēng)險(xiǎn)。
- 公共安全與應(yīng)急響應(yīng):應(yīng)用于人群監(jiān)控、交通流量分析、特定目標(biāo)(如失蹤人員、違規(guī)車輛)搜尋、災(zāi)害現(xiàn)場(地震、洪水)評估與搜救等任務(wù),為指揮決策提供實(shí)時(shí)、直觀的視覺情報(bào)。
- 環(huán)境監(jiān)測與保護(hù):用于河道排污口識別、非法捕撈/采礦行為監(jiān)控、垃圾分布調(diào)查、珍稀動植物監(jiān)測等,助力生態(tài)環(huán)境保護(hù)與執(zhí)法。
- 智慧城市與物流:參與城市三維建模、違章建筑識別,并在“最后一公里”配送、園區(qū)內(nèi)物資轉(zhuǎn)運(yùn)等物流場景中,實(shí)現(xiàn)自主導(dǎo)航與目標(biāo)識別抓取。
三、 工程和技術(shù)研究與試驗(yàn)發(fā)展
該領(lǐng)域的發(fā)展不僅停留在算法層面,更是一個涉及軟硬件協(xié)同、系統(tǒng)集成的工程實(shí)踐過程,其研究與試驗(yàn)發(fā)展重點(diǎn)包括:
- 嵌入式系統(tǒng)集成與部署:研究如何將優(yōu)化后的YOLO模型高效部署到無人機(jī)機(jī)載嵌入式AI芯片(如NVIDIA Jetson、華為Atlas、高通平臺)上,涉及推理引擎(TensorRT、OpenVINO、TNN)的適配與優(yōu)化,以實(shí)現(xiàn)端側(cè)實(shí)時(shí)智能。
- 異構(gòu)計(jì)算與能耗優(yōu)化:探索CPU、GPU、NPU乃至FPGA的協(xié)同計(jì)算策略,在保證檢測性能的最大限度降低系統(tǒng)功耗,延長無人機(jī)續(xù)航時(shí)間,這是工程化應(yīng)用的關(guān)鍵瓶頸之一。
- 仿真與真實(shí)環(huán)境測試驗(yàn)證:利用Gazebo、AirSim等仿真環(huán)境構(gòu)建大量逼真場景進(jìn)行算法前期測試與訓(xùn)練數(shù)據(jù)生成,同時(shí)結(jié)合野外真實(shí)飛行試驗(yàn),不斷迭代和驗(yàn)證系統(tǒng)的可靠性、穩(wěn)定性與安全性。
- “感知-決策-控制”閉環(huán)系統(tǒng)研究:將YOLO提供的視覺感知信息與無人機(jī)飛控系統(tǒng)、路徑規(guī)劃算法(如A、RRT)相結(jié)合,研究動態(tài)目標(biāo)跟蹤、自主避障、協(xié)同作業(yè)等高級智能行為,實(shí)現(xiàn)從“看得見”到“懂得行動”的跨越。
- 標(biāo)準(zhǔn)與規(guī)范探索:隨著應(yīng)用深入,相關(guān)的測試標(biāo)準(zhǔn)、數(shù)據(jù)安全規(guī)范、空域管理與倫理準(zhǔn)則等軟性技術(shù)研究也日益重要,為產(chǎn)業(yè)健康發(fā)展提供支撐。
基于YOLO的無人機(jī)技術(shù)正從實(shí)驗(yàn)室快速走向廣闊的工程應(yīng)用場。隨著算法持續(xù)進(jìn)化、算力芯片性能提升以及5G/6G通信技術(shù)的賦能,其應(yīng)用將更加深入、智能和自主,成為低空經(jīng)濟(jì)發(fā)展與產(chǎn)業(yè)數(shù)字化轉(zhuǎn)型的重要驅(qū)動力。
如若轉(zhuǎn)載,請注明出處:http://www.jiayuw.com.cn/product/61.html
更新時(shí)間:2026-01-11 02:09:43